Agentic Vision AI for ADAS: Multi-sensor Fusion for Intelligent Perception and Inference


For over a decade, ADAS has continually evolved with its focus on improving perception. We have seen different automotive companies integrate higher resolution cameras, advanced radar systems, LiDAR systems, and neural networks to improve the ADAS system and give top notch assistance to the driver.
Yet detection accuracy alone does not solve driving assistance challenges.
A vehicle may accurately identify a pedestrian, a cyclist, a lane marking, and an approaching vehicle. The more difficult challenge is understanding how these elements interact, determining what is likely to happen next, and generating appropriate assistance strategies.
As ADAS technology evolves toward higher levels of driver assistance, perception systems must not only detect objects but infer intent, predict behavior, and continuously reason about changing road conditions. This requires a new architectural approach where multi-sensor fusion, edge AI, and Agentic AI work together to transform raw sensor streams into contextual intelligence.
If the objective is to understand intent, anticipate behavior, and assist drivers proactively, Agentic AI becomes a necessity rather than an enhancement.
If you look at this from the angle of Tier-1 suppliers, this challenge becomes even more daunting because perception stacks need to scale across multiple vehicle programs, support evolving sensor configurations, accommodate increasing computational demands, and continuously integrate new ADAS capabilities while maintaining deterministic performance and functional safety requirements.
The differentiator for future ADAS systems will not be the number of sensors integrated into the vehicle. It will be the ability to understand context, evaluate risk, infer intent, and intelligently assist drivers in increasingly dynamic traffic environments.
Most ADAS systems today rely on perception pipelines that detect, classify, and track objects. These capabilities remain fundamental, but they often provide only a snapshot of the environment.
Consider a typical urban intersection. The perception system may identify:
Individually, each detection is accurate. However, safe driving assistance depends on understanding the relationships between these entities.
These questions cannot be answered through object detection alone. They require systems capable of interpreting context, evaluating interactions, estimating intent, and continuously reasoning about uncertainty.
This is precisely where Agentic Vision AI introduces a fundamental shift in ADAS architecture.
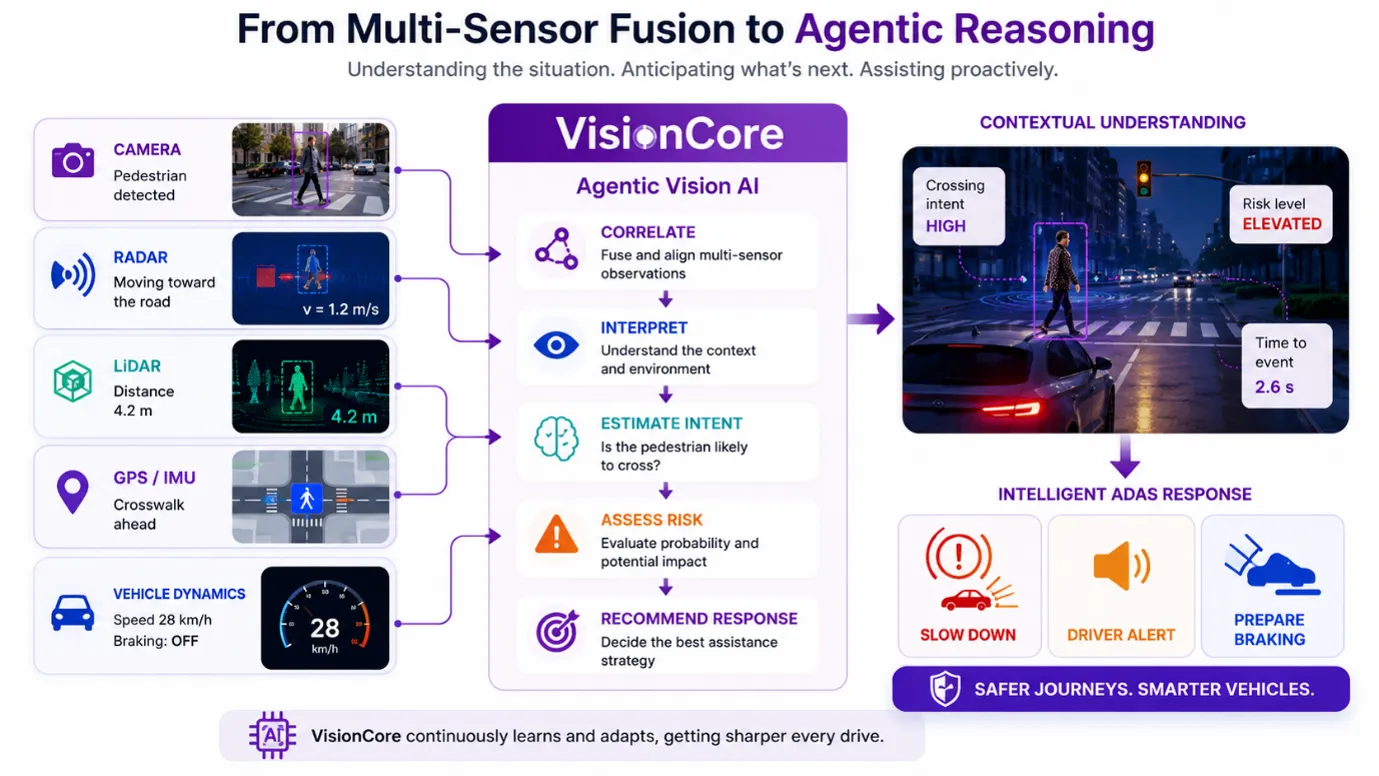
VisionCore is AgenticSky’s agentic vision AI solution accelerator designed to help engineering teams rapidly build systems that can perceive, interpret, and act on visual information.
Built on the AgenticSky Fabric, VisionCore enables products to perceive, interpret, decide, and engage by combining computer vision, AI inferences, contextual reasoning, and explainable intelligence into a reusable architecture.
VisionCore accelerates the development of systems capable of ingesting data from cameras, radar, LiDAR, ultrasonic sensors, localization systems, and driver monitoring technologies, and converting these inputs into a unified understanding of the driving environment that can support intelligent assistance decisions.
It works across the edge, near-edge, and cloud layers helping you deliver more meaningful assistance to driver. At the edge, VisionCore performs low-latency perception and inference tasks required for real-time driving assistance. Near-edge intelligence enables localized aggregation and orchestration of perception workloads, while cloud capabilities support continuous learning, scenario analysis, model evolution, and fleet-wide intelligence.
The outcome is a reusable architectural foundation that abstracts much of the complexity associated with sensor integration, perception orchestration, AI model deployment, and lifecycle management. By providing reusable building blocks for multi-sensor fusion and contextual inference.
It enables engineering teams to accelerate the development of inference-centric ADAS systems and focus their efforts on higher-value challenges such as intent prediction, risk assessment, and intelligent driver assistance behaviors.
Within an ADAS architecture, VisionCore operates as the intelligence layer that ingests, correlates, and interprets information originating from multiple sensing modalities. The process begins with continuous ingestion of data streams from cameras, radar, LiDAR, ultrasonic sensors, localization systems, and vehicle dynamics interfaces.
Since these sensors operate at different frequencies and provide different representations of the environment, VisionCore first establishes temporal and spatial alignment to ensure that observations correspond to the same real-world events.
Once synchronized, sensor outputs are transformed into machine-interpretable representations. Camera streams contribute semantic understanding of the environment, including object classification, lane markings, traffic signs, and road boundaries. Radar contributes range and velocity measurements, while LiDAR provides precise three-dimensional spatial information. Localization systems and vehicle dynamics data provide additional context regarding vehicle position, motion, and orientation.
VisionCore then correlates these observations to construct unified object tracks containing position, velocity, direction, acceleration, trajectories, and confidence estimates. Rather than maintaining independent sensor observations, the system creates a consolidated environmental representation that continuously evolves as new information becomes available.
At this stage, the system moves beyond object detection and begins constructing context. This model represents relationships between road participants, available drivable space, road geometry, environmental conditions, and dynamic interactions occurring within the vehicle’s surroundings.
Find out more about where else VisionCore can be deployed: VisionCore in Public Surveillance
Instead of treating detected objects as isolated entities, VisionCore continuously evaluates relationships between road participants, monitors changes in behavior, estimates intent, and generates hypotheses about how a situation may evolve. A pedestrian approaching a curb is not merely classified as an object.
The system reasons about proximity to a crosswalk, walking velocity, head orientation, and surrounding traffic conditions to estimate the likelihood of a crossing event. Similarly, synchronized deceleration patterns across multiple vehicles may indicate congestion, an obstruction, or an emerging hazard beyond the immediate sensor field of view.
The vehicle is no longer reacting to isolated detections. It is understanding an unfolding event.
Lets understand this further with an example. Imagine a vehicle entering a school zone. VisionCore detects a “School Zone” sign through computer vision, while GPS and HD maps confirm the location. At the same time, cameras identify children near the sidewalk, LiDAR detects parked vehicles creating blind spots, radar tracks a cyclist approaching from behind, and vehicle dynamics provide the host vehicle’s speed and trajectory.
Rather than treating these as isolated detections, VisionCore correlates them into a single driving context. It recognizes that the combination of a school zone, children, obstructed visibility, and approaching traffic increases the likelihood of an unpredictable crossing event.
Based on this understanding, the system proactively reduces speed, prepares the braking system, and continuously reassesses the situation as new sensor observations become available.
This is what makes Agentic Vision AI different. The system is not simply detecting objects, it is understanding the environment, reasoning about possible outcomes, and adapting its driving strategy to safely achieve its objective.
This is the essence of Agentic Vision AI in ADAS. Multi-sensor fusion establishes environmental awareness, while contextual reasoning transforms those observations into intelligent inferences that enable safer, more adaptive, and more proactive driver assistance.
As ADAS programs become increasingly sophisticated, engineering teams are under pressure to deliver higher levels of intelligence while simultaneously managing growing architectural complexity. Sensor counts continue to increase, compute platforms vary across vehicle programs, and perception workloads are becoming progressively more demanding.
For Tier-1 suppliers, this creates a difficult engineering challenge. Perception architectures can no longer be designed for a single sensor configuration or a single vehicle program. They must support heterogeneous sensors, scale across varying compute platforms, accommodate evolving ADAS functions, and continuously adapt to increasingly complex driving scenarios while operating within strict latency and functional safety requirements.
Building these capabilities entirely from scratch often means repeatedly solving the same foundational challenges such as sensor integration, data synchronization, perception orchestration, contextual reasoning, and lifecycle management. This is precisely where solution accelerators become valuable.
VisionCore provides reusable building blocks for multi-sensor fusion, environmental modeling, contextual reasoning, and edge-to-cloud intelligence orchestration. Instead of repeatedly engineering foundational capabilities, teams can focus their efforts on higher-value problems such as intent prediction, risk assessment, driver behavior understanding, and differentiated assistance experiences.
As ADAS systems become increasingly inference-centric, the ability to rapidly build, adapt, and deploy Agentic Vision AI capabilities will become a key competitive differentiator. The objective is no longer simply to build systems that can detect objects with higher accuracy. The objective is to build systems that can understand evolving situations, reason about uncertainty, anticipate potential outcomes, and assist drivers more intelligently.
ADAS systems are approaching a point where incremental improvements in perception accuracy alone will deliver diminishing returns.
The next wave of innovation will come from systems that can understand interactions, reason about uncertainty, and anticipate what may happen next.
Multi-sensor fusion provides environmental awareness. Agentic Vision AI transforms that awareness into contextual intelligence.
With VisionCore, the objective is not simply to build systems that can detect the world with greater precision. It is to build systems that can continuously perceive, interpret, and reason about the environment and deliver assistance that is increasingly proactive, adaptive, and intelligent.
The vehicle is no longer reacting to isolated detections. It is understanding an unfolding event.
The future of ADAS is not defined by adding more sensors or deploying larger AI models. It lies in enabling vehicles to interpret their environment with greater contextual awareness, reason about uncertainty, and make intelligent assistance decisions in real time.
Multi-sensor fusion provides the foundation for reliable environmental perception. Agentic Vision AI builds on that foundation by introducing contextual reasoning that helps ADAS systems move beyond object detection to understanding intent, predicting behavior, and proactively assisting the driver.
VisionCore brings these capabilities together as an Agentic Vision AI solution accelerator. By providing reusable building blocks for multi-sensor fusion, environmental modeling, contextual reasoning, and edge-to-cloud intelligence, it enables engineering teams to focus on building differentiated ADAS capabilities instead of repeatedly solving foundational perception and integration challenges.
Whether you’re developing highway assist, urban driving assistance, autonomous parking, driver monitoring, or next-generation software-defined vehicle platforms, VisionCore provides a scalable foundation for building inference-centric ADAS architectures.
Explore how VisionCore can accelerate your Agentic Vision AI initiatives and help you build intelligent perception systems for the next generation of vehicles.
Get in touch with us and we will help you integrate VisionCore into your next product innovation.

Smishad Thomas is a Technical Marketing Manager at MosChip. He has over 13 years of experience in technology marketing, branding, and content leadership. He has a keen interest in product engineering and loves developing convincing stories that translates technical innovations into clear, engaging messaging that resonates with business audiences

In contrast to traditional mass media, such as printed material or audio recordings, which feature little to no interaction between…

Industrial automation and digital manufacturing are evolving rapidly as Edge AI models are reducing…

Factory floors today are generating more operational data than ever before. From CNC machines…

The Artificial Intelligence of Things (AIoT) is revolutionizing industries by combining the power of Artificial Intelligence (AI) and the Internet…

Traditional automotive cockpits relied on analog gauges, mechanical switches, and standalone infotainment hardware…
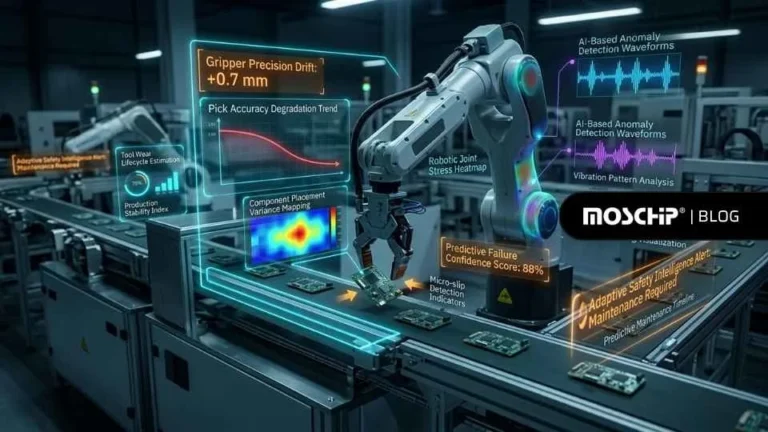
At 1:49 am, during a night shift in a factory, a robotic pick-and-place arm, running on line-2, is feeding components…
How can manufacturers transform fragmented operational data into real-time intelligence...

Industrial machines are evolving from systems that simply report their status to system…
When it comes to smart homes, getting devices connected is only the beginning. Matter has transformed…